# 📺 视频演示

G1 (29自由度) + Dex3-1
|

H1_2 (手臂7自由度)
|
# 🔖 版本说明
## 🏷️ v1.2
1. 升级Dex1_1夹爪控制代码,匹配 [dex1_1 service](https://github.com/unitreerobotics/dex1_1_service) 驱动
## 🏷️ v1.1
1. 末端执行器类型新增'brainco',这是[强脑科技第二代灵巧手](https://www.brainco-hz.com/docs/revolimb-hand/)
2. 为避免与实机部署时发生冲突,将仿真模式下的 dds 通道的domain id修改为1
3. 修复默认频率过高的问题
## 🏷️ v1.0 (newvuer)
1. 升级 [Vuer](https://github.com/vuer-ai/vuer) 库至 v0.0.60 版本,XR设备支持模式扩展为**手部跟踪**和**控制器跟踪**两种。为更准确反映功能范围,项目由 **avp_teleoperate** 更名为 **xr_teleoperate**。
测试设备包括: Apple Vision Pro,Meta Quest 3(含手柄) 与 PICO 4 Ultra Enterprise(含手柄)。
2. 对部分功能进行了**模块化**拆分,并通过 Git 子模块(git submodule)方式进行管理和加载,提升代码结构的清晰度与维护性。
3. 新增**无头**、**运控**及**仿真**模式,优化启动参数配置(详见第2.2节),提升使用便捷性。**仿真**模式的加入,方便了环境验证和硬件故障排查。
4. 将默认手部映射算法从 Vector 切换为 **DexPilot**,优化了指尖捏合的精度与交互体验。
5. 其他一些优化
## 🏷️ v0.5 (oldvuer)
1. 该版本曾经命名为 `avp_teleoperate`
2. 支持 'G1_29', 'G1_23', 'H1_2', 'H1' 机器人类型
3. 支持 'dex3', 'gripper', 'inspire1' 末端执行器类型
4. 仅支持 XR 设备的手部跟踪模式( [Vuer](https://github.com/vuer-ai/vuer) 版本为 v0.0.32RC7),不支持控制器模式
5. 支持数据录制模式
# 0. 📖 介绍
该仓库实现了使用 **XR设备(Extended Reality)**(比如 Apple Vision Pro、PICO 4 Ultra Enterprise 或 Meta Quest 3 等) 对 **宇树(Unitree)人形机器人** 的遥操作控制。
> 如果您之前从没有使用过宇树机器人,那么请您至少先阅读至[官方文档](https://support.unitree.com/main/zh)应用开发章节。
>
> 另外,本仓库的[维基文档](https://github.com/unitreerobotics/xr_teleoperate/wiki)也有很多相关知识可以供您参考。
以下是系统示意图:
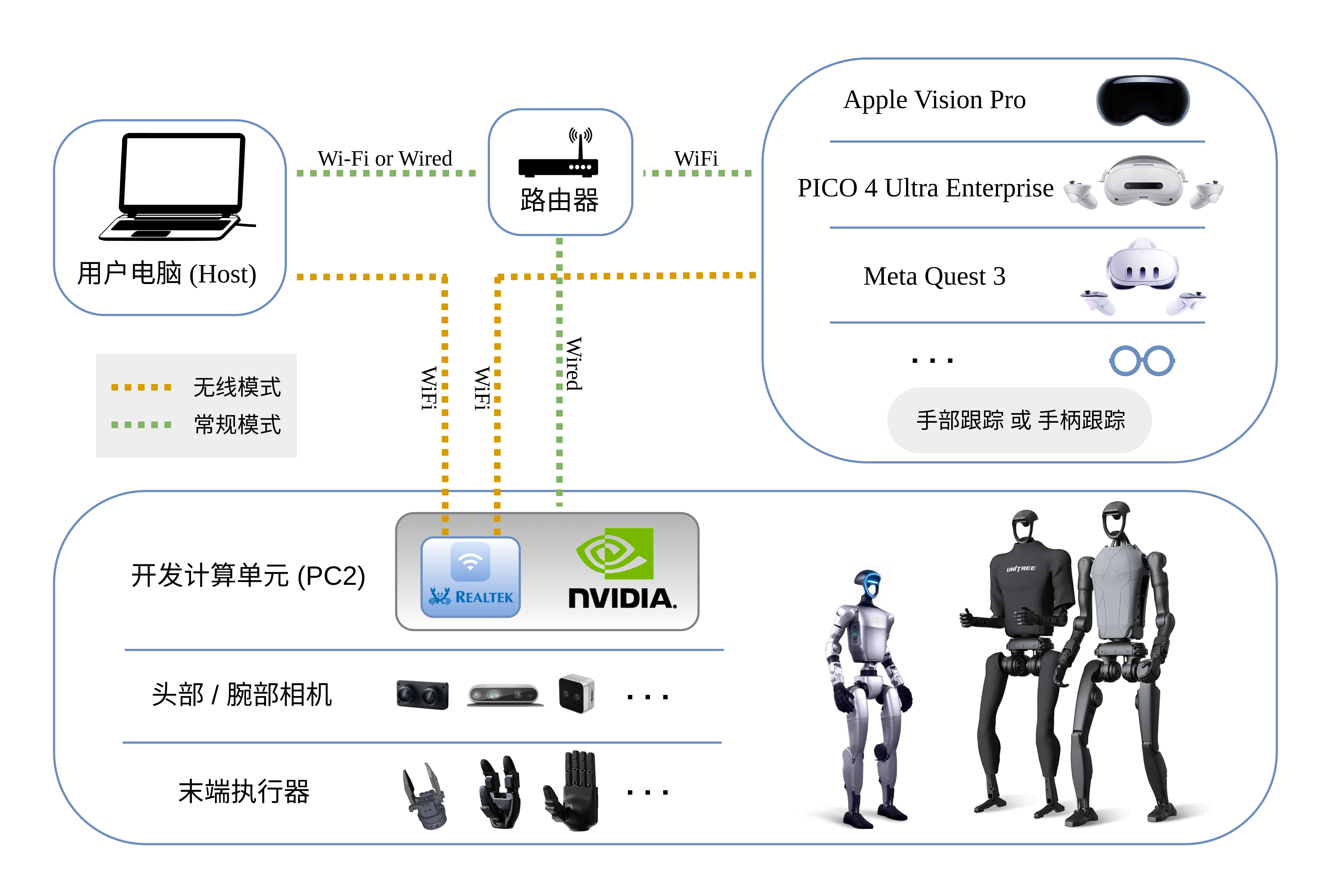
以下是本仓库目前支持的设备类型:
# 1. 📦 安装
我们在 Ubuntu 20.04 和 Ubuntu 22.04 上测试了我们的代码,其他操作系统可能需要不同的配置。本文档主要介绍常规模式。
有关更多信息,您可以参考 [官方文档](https://support.unitree.com/home/zh/Teleoperation) 和 [OpenTeleVision](https://github.com/OpenTeleVision/TeleVision)。
## 1.1 📥 基础环境
```bash
# 创建 conda 基础环境
(base) unitree@Host:~$ conda create -n tv python=3.10 pinocchio=3.1.0 numpy=1.26.4 -c conda-forge
(base) unitree@Host:~$ conda activate tv
# 克隆本仓库
(tv) unitree@Host:~$ git clone https://github.com/unitreerobotics/xr_teleoperate.git
(tv) unitree@Host:~$ cd xr_teleoperate
# 浅克隆子模块
(tv) unitree@Host:~/xr_teleoperate$ git submodule update --init --depth 1
# 安装 televuer 模块
(tv) unitree@Host:~/xr_teleoperate$ cd teleop/televuer
(tv) unitree@Host:~/xr_teleoperate/teleop/televuer$ pip install -e .
# 生成 televuer 模块所需的证书文件
(tv) unitree@Host:~/xr_teleoperate/teleop/televuer$ openssl req -x509 -nodes -days 365 -newkey rsa:2048 -keyout key.pem -out cert.pem
# 安装 dex-retargeting 模块
(tv) unitree@Host:~/xr_teleoperate/teleop/televuer$ cd ../robot_control/dex-retargeting/
(tv) unitree@Host:~/xr_teleoperate/teleop/robot_control/dex-retargeting$ pip install -e .
# 安装本仓库所需的其他依赖库
(tv) unitree@Host:~/xr_teleoperate/teleop/robot_control/dex-retargeting$ cd ../../../
(tv) unitree@Host:~/xr_teleoperate$ pip install -r requirements.txt
```
## 1.2 🕹️ unitree_sdk2_python
```bash
# 安装 unitree_sdk2_python 库,该库负责开发设备与机器人之间的通信控制功能
(tv) unitree@Host:~$ git clone https://github.com/unitreerobotics/unitree_sdk2_python.git
(tv) unitree@Host:~$ cd unitree_sdk2_python
(tv) unitree@Host:~/unitree_sdk2_python$ pip install -e .
```
> 注意1:在 `xr_teleoperate >= v1.1` 版本中,`unitree_sdk2_python` 仓库的 commit **必须是等于或高于** [404fe44d76f705c002c97e773276f2a8fefb57e4](https://github.com/unitreerobotics/unitree_sdk2_python/commit/404fe44d76f705c002c97e773276f2a8fefb57e4) 版本
> 注意2:原 h1_2 分支中的 [unitree_dds_wrapper](https://github.com/unitreerobotics/unitree_dds_wrapper) 为临时版本,现已全面转换到上述正式的 Python 版控制通信库:[unitree_sdk2_python](https://github.com/unitreerobotics/unitree_sdk2_python)
> 注意3:命令前面的所有标识符是为了提示:该命令应该在哪个设备和目录下执行。
>
> p.s. 在 Ubuntu 系统 `~/.bashrc` 文件中,默认配置: `PS1='${debian_chroot:+($debian_chroot)}\u@\h:\w\$ '`
>
> - 以`(tv) unitree@Host:~$ pip install meshcat` 命令为例:
>
> - `(tv)` 表示 shell 此时位于 conda 创建的 tv 环境中;
>
> - `unitree@Host:~` 表示用户标识 unitree 在设备 Host 上登录,当前的工作目录为 `$HOME`;
>
> - $ 表示当前 shell 为 Bash;
>
> - pip install meshcat 是用户标识 unitree 要在 设备 Host 上执行的命令。
>
> 您可以参考 [Harley Hahn's Guide to Unix and Linux](https://www.harley.com/unix-book/book/chapters/04.html#H) 和 [Conda User Guide](https://docs.conda.io/projects/conda/en/latest/user-guide/getting-started.html) 来深入了解这些知识。
# 2. 💻 仿真部署
## 2.1 📥 环境配置
首先,请安装 [unitree_sim_isaaclab](https://github.com/unitreerobotics/unitree_sim_isaaclab)。具体安装步骤,可参考该仓库 README 文档。
其次,启动 unitree_sim_isaaclab 仿真环境。假设使用 G1(29 DoF) 和 Dex3 灵巧手配置进行仿真,则启动命令示例如下:
```bash
(base) unitree@Host:~$ conda activate unitree_sim_env
(unitree_sim_env) unitree@Host:~$ cd ~/unitree_sim_isaaclab
(unitree_sim_env) unitree@Host:~/unitree_sim_isaaclab$ python sim_main.py --device cpu --enable_cameras --task Isaac-PickPlace-Cylinder-G129-Dex3-Joint --enable_dex3_dds --robot_type g129
```
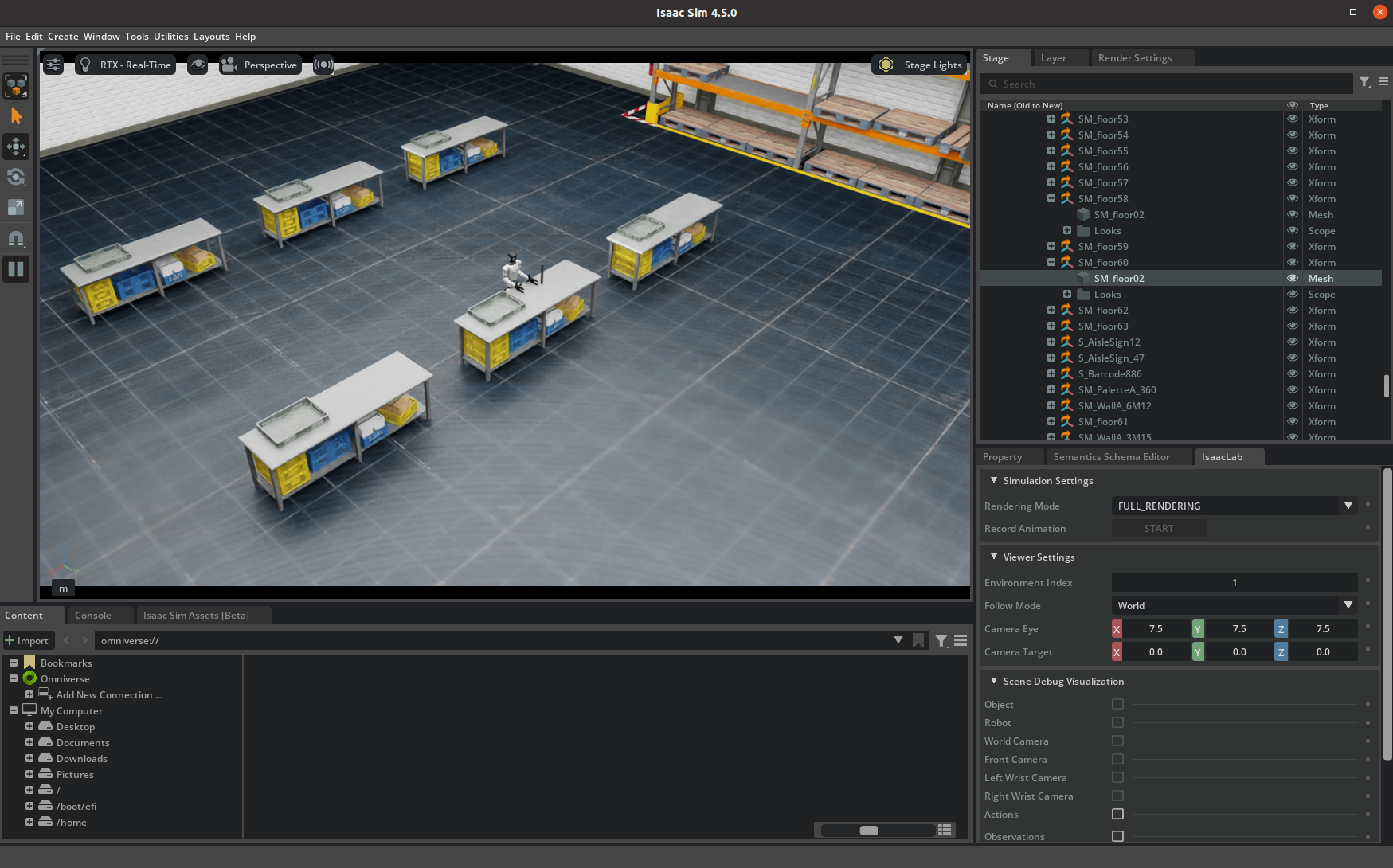
💥💥💥 请注意❗
> **仿真环境启动后,使用鼠标左键在窗口内点击一次以激活仿真运行状态。**
>
> 此时,终端内输出 `controller started, start main loop...`。
仿真界面如下图所示:
## 2.2 🚀 启动遥操
本程序支持通过 XR 设备(比如手势或手柄)来控制实际机器人动作,也支持在虚拟仿真中运行。你可以根据需要,通过命令行参数来配置运行方式。
以下是本程序的启动参数说明:
- 基础控制参数
| ⚙️ 参数 | 📜 说明 | 🔘 目前可选值 | 📌 默认值 |
| :---------: | :----------------------------------------------: | :------------------------------------------------------: | :------: |
| `--xr-mode` | 选择 XR 输入模式(通过什么方式控制机器人) | `hand`(**手势跟踪**)
`controller`(**手柄跟踪**) | `hand` |
| `--arm` | 选择机器人设备类型(可参考 0. 📖 介绍) | `G1_29`
`G1_23`
`H1_2`
`H1` | `G1_29` |
| `--ee` | 选择手臂的末端执行器设备类型(可参考 0. 📖 介绍) | `dex1`
`dex3`
`inspire1`
`brainco` | 无默认值 |
- 模式开关参数
| ⚙️ 参数 | 📜 说明 |
| :----------: | :----------------------------------------------------------: |
| `--record` | 【启用**数据录制**模式】
按 **r** 键进入遥操后,按 **s** 键可开启数据录制,再次按 **s** 键可结束录制并保存本次 episode 数据。
继续按下 **s** 键可重复前述过程。 |
| `--motion` | 【启用**运动控制**模式】
开启本模式后,可在机器人运控程序运行下进行遥操作程序。
**手势跟踪**模式下,可使用 [R3遥控器](https://www.unitree.com/cn/R3) 控制机器人正常行走;**手柄跟踪**模式下,也可使用[手柄摇杆控制机器人行走](https://github.com/unitreerobotics/xr_teleoperate/blob/375cdc27605de377c698e2b89cad0e5885724ca6/teleop/teleop_hand_and_arm.py#L247-L257)。 |
| `--headless` | 【启用**无图形界面**模式】
适用于本程序部署在开发计算单元(PC2)等无显示器情况 |
| `--sim` | 【启用[**仿真模式**](https://github.com/unitreerobotics/unitree_sim_isaaclab)】 |
------
根据上述参数说明以及仿真环境配置,我们假设选择**手势跟踪**来控制 G1(29 DoF) + Dex3 灵巧手设备,同时开启仿真模式和数据录制模式。
则启动命令如下所示:
```bash
(tv) unitree@Host:~$ cd ~/xr_teleoperate/teleop/
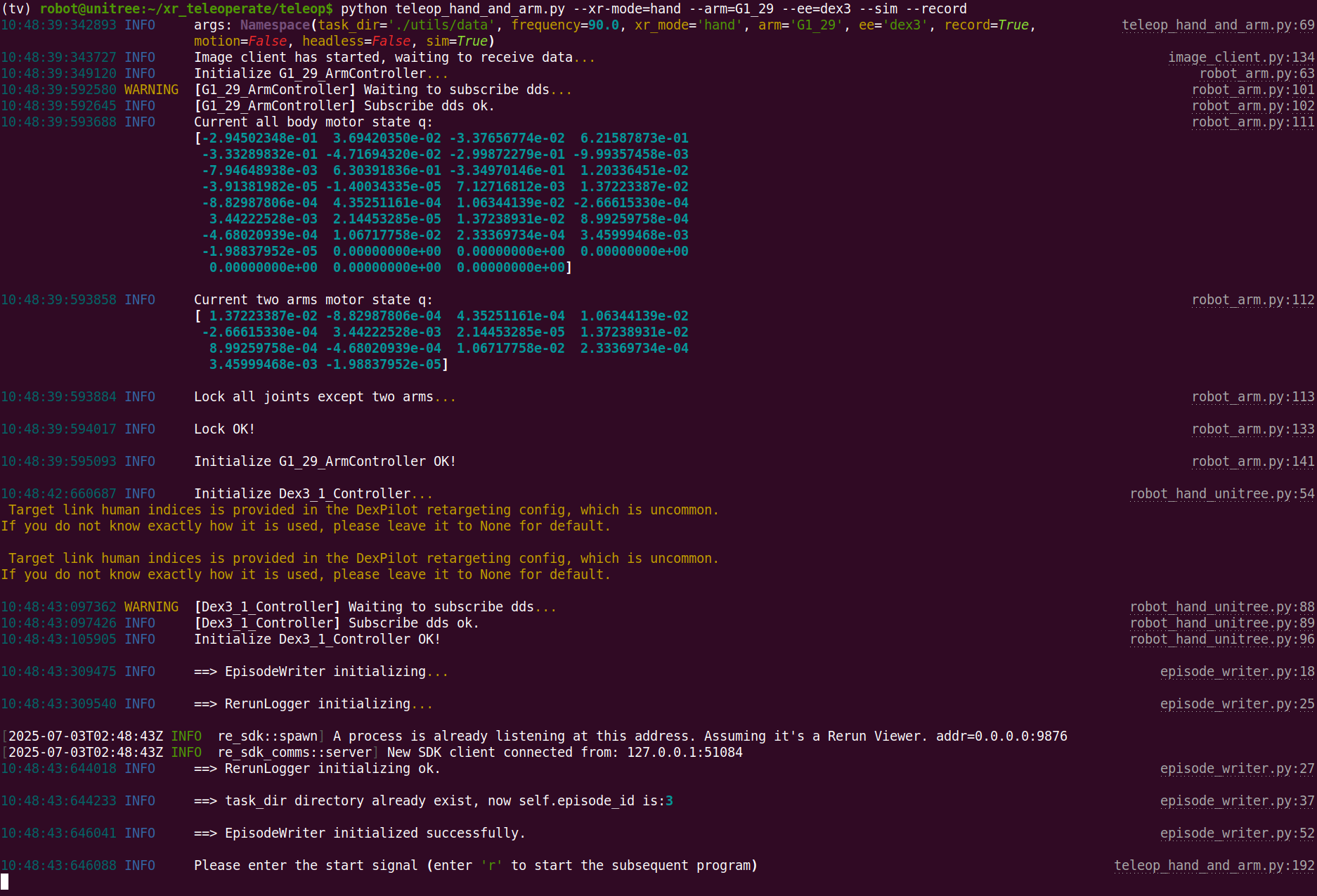
(tv) unitree@Host:~/xr_teleoperate/teleop/$ python teleop_hand_and_arm.py --xr-mode=hand --arm=G1_29 --ee=dex3 --sim --record
# 实际上,由于一些参数存在默认值,该命令也可简化为:
(tv) unitree@Host:~/xr_teleoperate/teleop/$ python teleop_hand_and_arm.py --ee=dex3 --sim --record
```
程序正常启动后,终端输出信息如下图所示:
接下来,执行以下步骤:
1. 戴上您的 XR 头显设备(比如 apple vision pro 或 pico4 ultra enterprise等)
2. 连接对应的 WiFi 热点
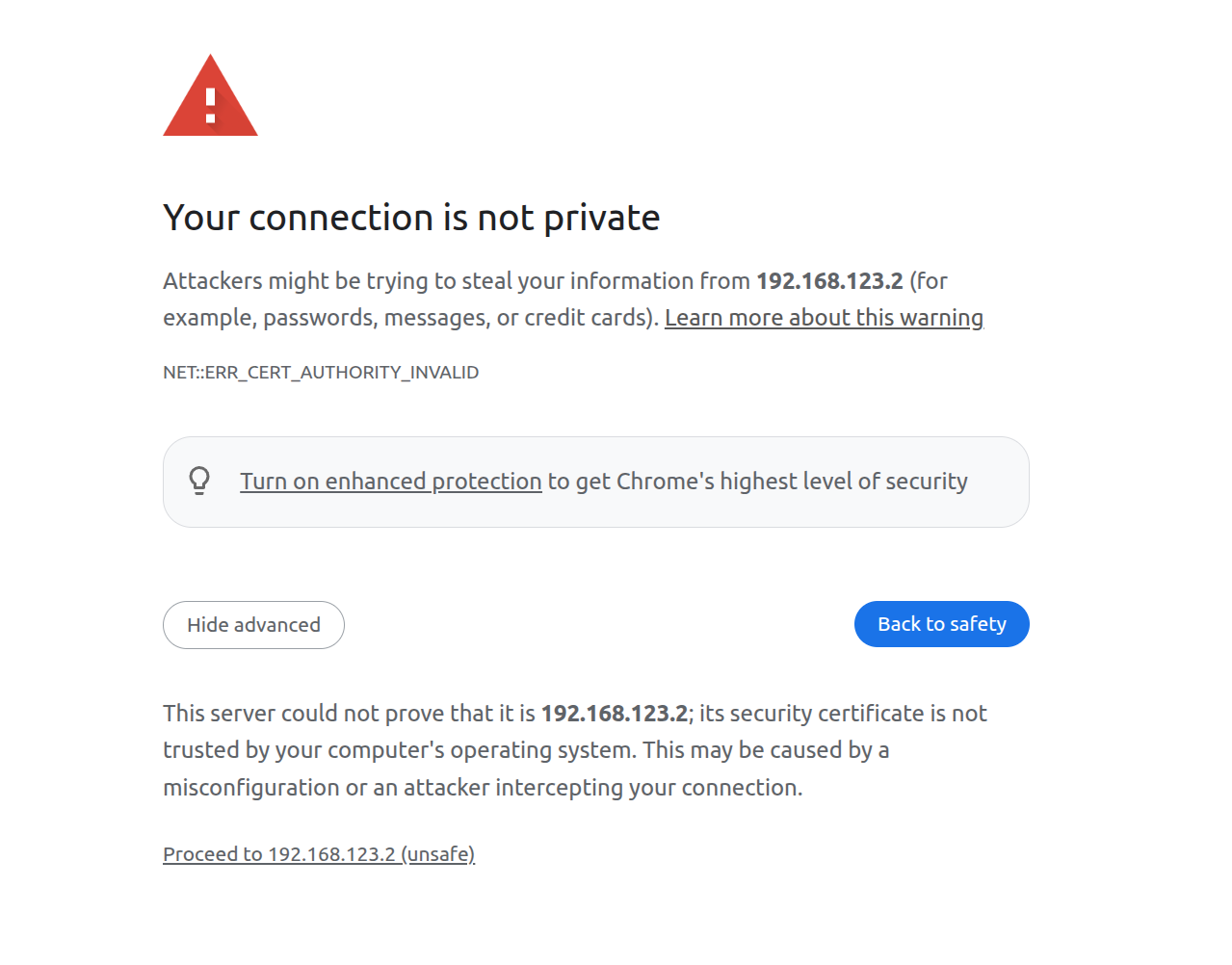
3. 打开浏览器应用(比如 Safari 或 PICO Browser),输入并访问网址:https://192.168.123.2:8012?ws=wss://192.168.123.2:8012
> 注意1:此 IP 地址应与您的 **主机** IP 地址匹配。该地址可以使用 `ifconfig` 等类似命令查询。
> 注意2:此时可能弹出下图所示的警告信息。请点击`Advanced`按钮后,继续点击 `Proceed to ip (unsafe)` 按钮,使用非安全方式继续登录服务器。
4. 进入`Vuer`网页界面后,点击 **`Virtual Reality`** 按钮。在允许后续的所有对话框后,启动 VR 会话。界面如下图所示:
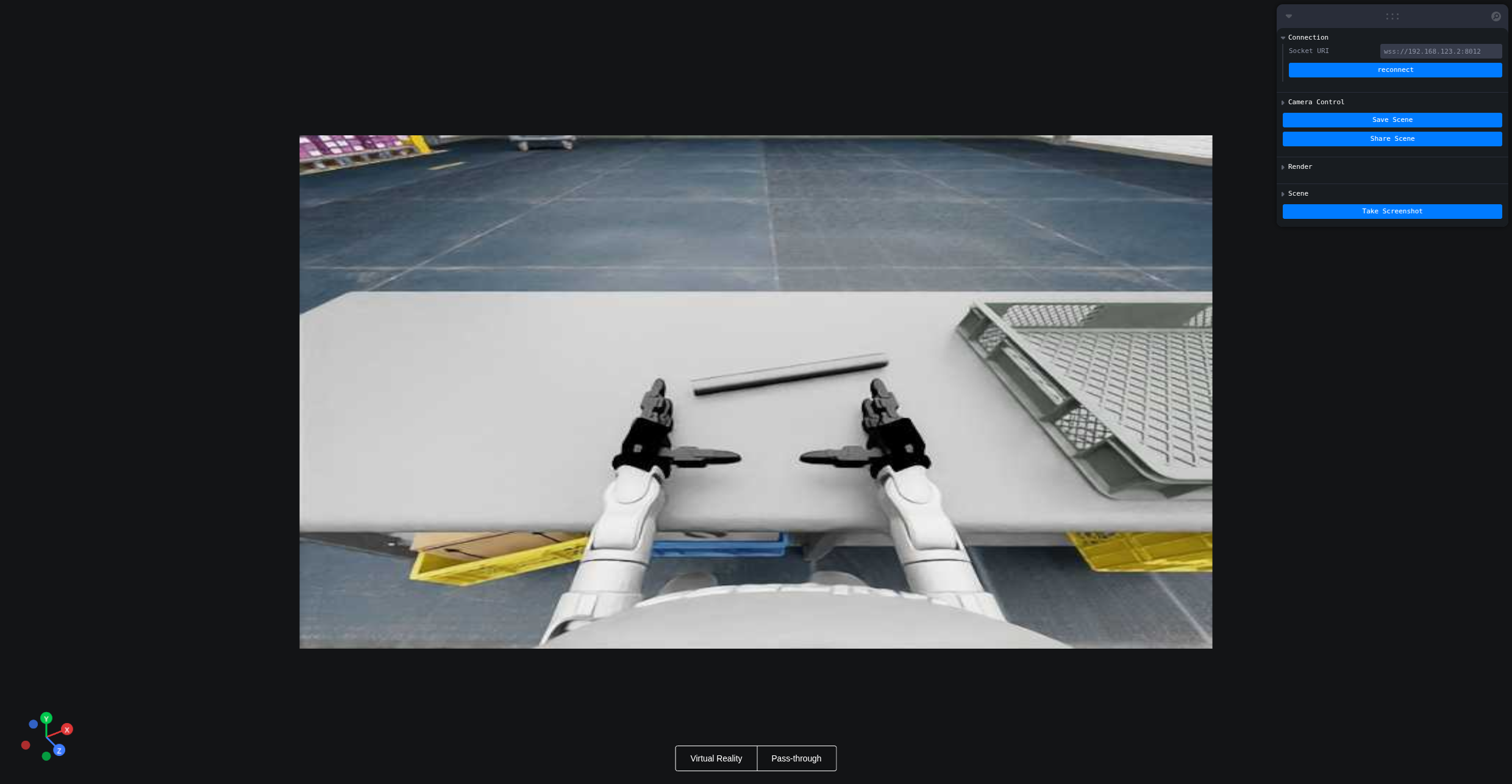
5. 此时,您将会在 XR 头显设备中看到机器人的第一人称视野。同时,终端打印出链接建立的信息:
```bash
websocket is connected. id:dbb8537d-a58c-4c57-b49d-cbb91bd25b90
default socket worker is up, adding clientEvents
Uplink task running. id:dbb8537d-a58c-4c57-b49d-cbb91bd25b90
```
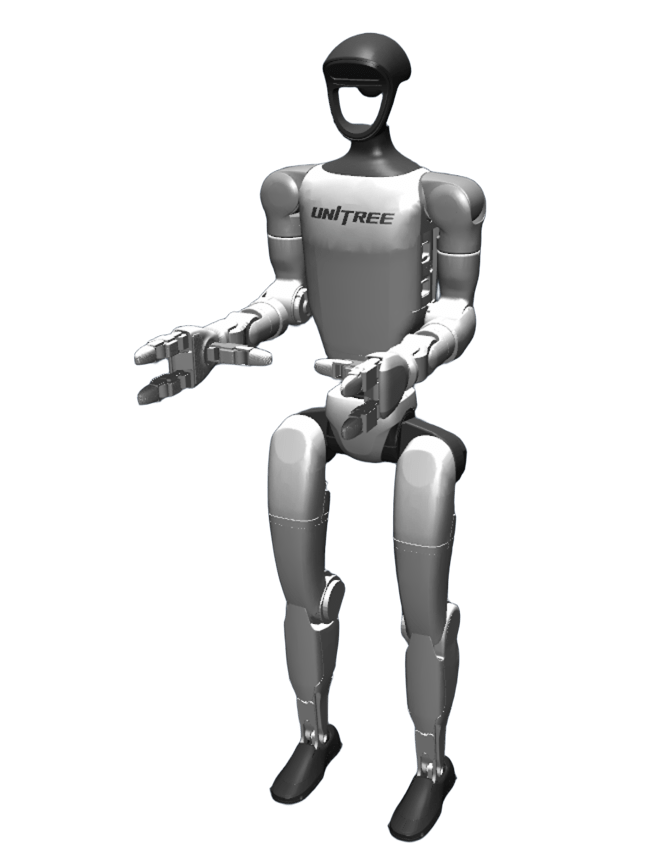
6. 然后,将手臂形状摆放到与**机器人初始姿态**相接近的姿势。这一步是为了避免在实物部署时,初始位姿差距过大导致机器人产生过大的摆动。
机器人初始姿态示意图如下:
7. 最后,在终端中按下 **r** 键后,正式开启遥操作程序。此时,您可以远程控制机器人的手臂(和灵巧手)
8. 在遥操过程中,按 **s** 键可开启数据录制,再次按 **s** 键可结束录制并保存数据(该过程可重复)
数据录制过程示意图如下:
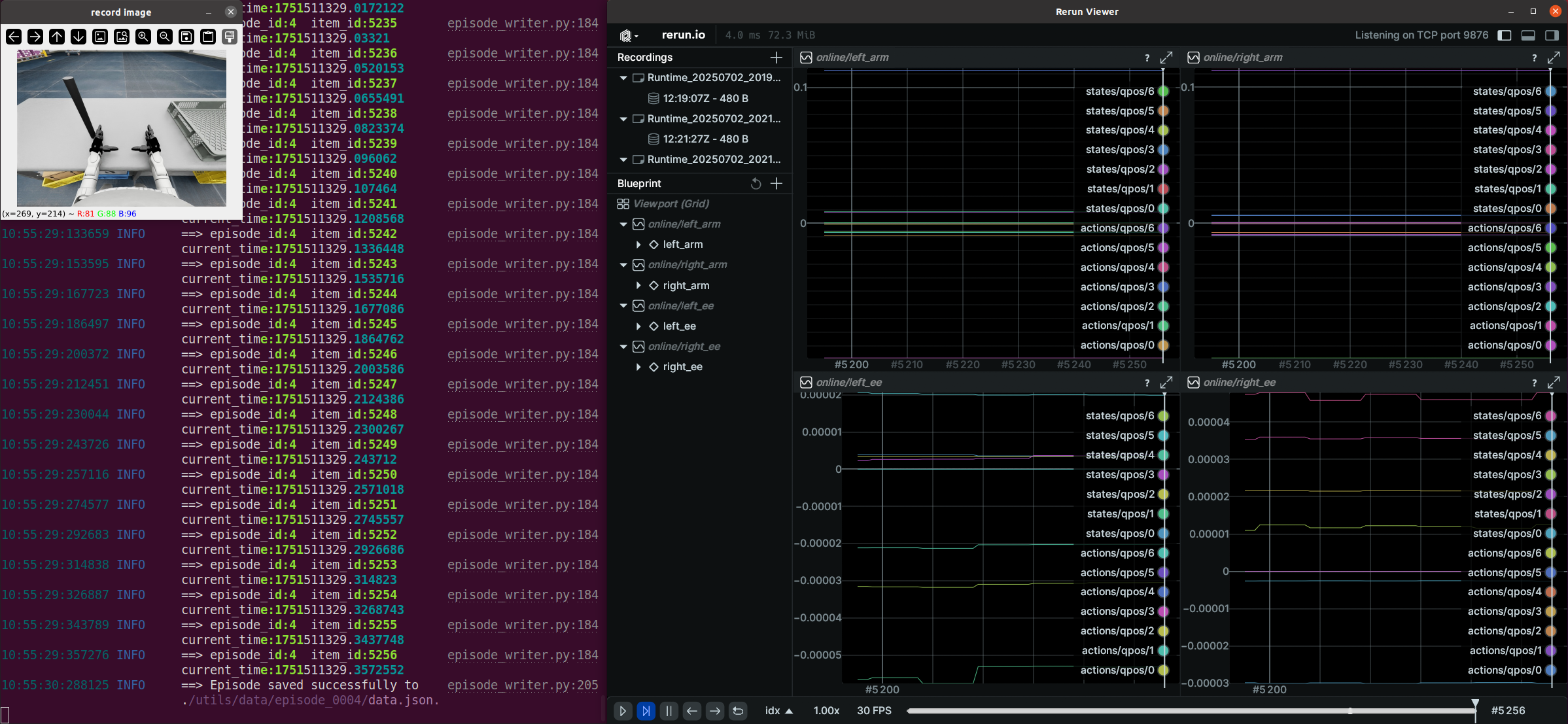
> 注意1:录制的数据默认存储在 `xr_teleoperate/teleop/utils/data` 中。数据使用说明见此仓库: [unitree_IL_lerobot](https://github.com/unitreerobotics/unitree_IL_lerobot/blob/main/README_zh.md#%E6%95%B0%E6%8D%AE%E9%87%87%E9%9B%86%E4%B8%8E%E8%BD%AC%E6%8D%A2)。
>
> 注意2:请在录制数据时注意您的硬盘空间大小。
## 2.3 🔚 退出
要退出程序,可以在终端窗口(或 'record image' 窗口)中按下 **q** 键。
# 3. 🤖 实物部署
实物部署与仿真部署步骤基本相似,下面将重点指出不同之处。
## 3.1 🖼️ 图像服务
仿真环境中已经自动开启了图像服务。实物部署时,需要针对自身相机硬件类型,手动开启图像服务。步骤如下:
将 `xr_teleoperate/teleop/image_server` 目录中的 `image_server.py` 复制到宇树机器人(G1/H1/H1_2 等)的 **开发计算单元 PC2**。
```bash
# 提醒:可以通过scp命令将image_server.py传输到PC2,然后使用ssh远程登录PC2后执行它。
# 假设开发计算单元PC2的ip地址为192.168.123.164,那么传输过程示例如下:
# 先ssh登录PC2,创建图像服务器的文件夹
(tv) unitree@Host:~$ ssh unitree@192.168.123.164 "mkdir -p ~/image_server"
# 将本地的image_server.py拷贝至PC2的~/image_server目录下
(tv) unitree@Host:~$ scp ~/xr_teleoperate/teleop/image_server/image_server.py unitree@192.168.123.164:~/image_server/
```
并在 **PC2** 上执行以下命令:
```bash
# 提醒:目前该图像传输程序支持OpenCV和Realsense SDK两种读取图像的方式,请阅读image_server.py的ImageServer类的注释以便您根据自己的相机硬件来配置自己的图像传输服务。
# 现在位于宇树机器人 PC2 终端
unitree@PC2:~/image_server$ python image_server.py
# 您可以看到终端输出如下:
# {'fps': 30, 'head_camera_type': 'opencv', 'head_camera_image_shape': [480, 1280], 'head_camera_id_numbers': [0]}
# [Image Server] Head camera 0 resolution: 480.0 x 1280.0
# [Image Server] Image server has started, waiting for client connections...
```
在图像服务启动后,您可以在 **主机** 终端上使用 `image_client.py` 测试通信是否成功:
```bash
(tv) unitree@Host:~/xr_teleoperate/teleop/image_server$ python image_client.py
```
## 3.2 ✋ Inspire 手部服务(可选)
> 注意1:如果选择的机器人配置中没有使用 Inspire 系列灵巧手,那么请忽略本节内容。
>
> 注意2:如果选择的G1机器人配置,且使用 [Inspire DFX 灵巧手](https://support.unitree.com/home/zh/G1_developer/inspire_dfx_dexterous_hand),相关issue [#46](https://github.com/unitreerobotics/xr_teleoperate/issues/46)。
>
> 注意3:如果选择的机器人配置中使用了 [Inspire FTP 灵巧手](https://support.unitree.com/home/zh/G1_developer/inspire_ftp_dexterity_hand),相关issue [ #48](https://github.com/unitreerobotics/xr_teleoperate/issues/48)。
首先,使用 [此链接: DFX_inspire_service](https://github.com/unitreerobotics/DFX_inspire_service) 克隆灵巧手控制接口程序,然后将其复制到宇树机器人的**PC2**。
在宇树机器人的 **PC2** 上,执行命令:
```bash
unitree@PC2:~$ sudo apt install libboost-all-dev libspdlog-dev
# 构建项目
unitree@PC2:~$ cd DFX_inspire_service && mkdir build && cd build
unitree@PC2:~/DFX_inspire_service/build$ cmake ..
unitree@PC2:~/DFX_inspire_service/build$ make -j6
# (For unitree g1)终端 1.
unitree@PC2:~/DFX_inspire_service/build$ sudo ./inspire_g1
# 或(For unitree h1)终端 1.
unitree@PC2:~/DFX_inspire_service/build$ sudo ./inspire_h1 -s /dev/ttyUSB0
# 终端 2. 运行示例
unitree@PC2:~/DFX_inspire_service/build$ ./hand_example
```
如果两只手连续打开和关闭,则表示成功。一旦成功,即可关闭终端 2 中的 `./hand_example` 程序。
## 3.3 ✋BrainCo 手部服务(可选)
请参考[官方文档](https://support.unitree.com/home/zh/G1_developer/brainco_hand)。安装完毕后,请手动启动两个灵巧手的服务,命令示例如下(串口名称可能与实际有所差别):
```bash
# Terminal 1.
sudo ./brainco_hand --id 126 --serial /dev/ttyUSB1
# Terminal 2.
sudo ./brainco_hand --id 127 --serial /dev/ttyUSB2
```
## 3.4 🚀 启动遥操
> 
>
> 1. 所有人员必须与机器人保持安全距离,以防止任何潜在的危险!
> 2. 在运行此程序之前,请确保至少阅读一次 [官方文档](https://support.unitree.com/home/zh/Teleoperation)。
> 3. 没有开启**运动控制**模式(`--motion`)时,请务必确保机器人已经进入 [调试模式(L2+R2)](https://support.unitree.com/home/zh/G1_developer/remote_control),以停止运动控制程序发送指令,这样可以避免潜在的指令冲突问题。
> 4. 如果要开启**运动控制**模式遥操作,请提前使用 [R3遥控器](https://www.unitree.com/cn/R3) 确保机器人进入主运控模式。
> 5. 开启**运动控制**模式(`--motion`)时:
> - 右手柄按键 `A` 为遥操作**退出**功能按键;
> - 左手柄和右手柄的两个摇杆按键同时按下为软急停按键,机器人会退出运控程序并进入阻尼模式,该功能只在必要情况下使用
> - 左手柄摇杆控制机器人前后左右(最大控制速度已经在程序中进行了限制)
> - 右手柄摇杆控制机器人转向(最大控制速度已经在程序中进行了限制)
与仿真部署基本一致,但要注意上述警告事项。
## 3.5 🔚 退出
> 
>
> 为了避免损坏机器人,最好确保将机器人手臂摆放为与机器人初始姿态附近的恰当位置后,再按 **q** 退出。
>
> 调试模式下:按下退出键后,机器人双臂将在5秒内返回机器人初始姿态,然后结束控制。
>
> 运控模式下:按下退出键后,机器人双臂将在5秒内返回机器人运控姿态,然后结束控制。
与仿真部署基本一致,但要注意上述警告事项。
# 4. 🗺️ 代码库教程
```
xr_teleoperate/
│
├── assets [存储机器人 URDF 相关文件]
│
├── hardware [存储 3D 打印模组]
│
├── teleop
│ ├── image_server
│ │ ├── image_client.py [用于从机器人图像服务器接收图像数据]
│ │ ├── image_server.py [从摄像头捕获图像并通过网络发送(在机器人板载计算单元PC2上运行)]
│ │
│ ├── televuer
│ │ ├── src/televuer
│ │ ├── television.py [使用 Vuer 从 XR 设备捕获头部、腕部和手部/手柄等数据]
│ │ ├── tv_wrapper.py [对捕获的数据进行后处理]
│ │ ├── test
│ │ ├── _test_television.py [television.py 的测试程序]
│ │ ├── _test_tv_wrapper.py [tv_wrapper.py 的测试程序]
│ │
│ ├── robot_control
│ │ ├── src/dex-retargeting [灵巧手映射算法库]
│ │ ├── robot_arm_ik.py [手臂的逆运动学]
│ │ ├── robot_arm.py [控制双臂关节并锁定其他部分]
│ │ ├── hand_retargeting.py [灵巧手映射算法库 Wrapper]
│ │ ├── robot_hand_inspire.py [控制因时灵巧手]
│ │ ├── robot_hand_unitree.py [控制宇树灵巧手]
│ │
│ ├── utils
│ │ ├── episode_writer.py [用于记录模仿学习的数据]
│ │ ├── weighted_moving_filter.py [用于过滤关节数据的滤波器]
│ │ ├── rerun_visualizer.py [用于可视化录制数据]
│ │
│ │──teleop_hand_and_arm.py [遥操作的启动执行代码]
```
# 5. 🛠️ 硬件
## 5.1 📋 清单
| 项目 | 数量 | 链接 | 备注 |
| :-----------------------: | :--: | :----------------------------------------------------------: | :----------------------------------------------------------: |
| **宇树通用人形机器人 G1** | 1 | https://www.unitree.com/cn/g1 | 需选配开发计算单元版本 |
| **XR 设备** | 1 | https://www.apple.com.cn/apple-vision-pro/
https://www.meta.com/quest/quest-3
https://www.picoxr.com/products/pico4-ultra-enterprise | |
| 路由器 | 1 | | 常规模式必须,无线模式不需要 |
| **用户电脑** | 1 | | 仿真模式下请使用[官方推荐](https://docs.isaacsim.omniverse.nvidia.com/4.5.0/installation/requirements.html)的硬件资源进行部署使用 |
| **头部双目相机** | 1 | [仅供参考] http://e.tb.cn/h.TaZxgkpfWkNCakg?tk=KKz03Kyu04u | 用于机器人头部视野 |
| **头部相机支架** | 1 | https://github.com/unitreerobotics/xr_teleoperate/blob/g1/hardware/head_stereo_camera_mount.STEP | 用于装配头部相机 |
| 英特尔 RealSense D405相机 | 2 | https://www.intelrealsense.com/depth-camera-d405/ | 用于腕部灵巧操作视野 |
| 腕部相机环形支架 | 2 | https://github.com/unitreerobotics/xr_teleoperate/blob/g1/hardware/wrist_ring_mount.STEP | 与腕部相机支架搭配使用 |
| 左腕相机支架 | 1 | https://github.com/unitreerobotics/xr_teleoperate/blob/g1/hardware/left_wrist_D405_camera_mount.STEP | 用于装配左腕D405相机 |
| 右腕相机支架 | 1 | https://github.com/unitreerobotics/xr_teleoperate/blob/g1/hardware/right_wrist_D405_camera_mount.STEP | 用于装配右腕D405相机 |
| M3-1 六角螺母 | 4 | [仅供参考] https://a.co/d/gQaLtHD | 用于腕部紧固件 |
| M3x12 螺钉 | 4 | [仅供参考] https://amzn.asia/d/aU9NHSf | 用于腕部紧固件 |
| M3x6 螺钉 | 4 | [仅供参考] https://amzn.asia/d/0nEz5dJ | 用于腕部紧固件 |
| **M4x14 螺钉** | 2 | [仅供参考] https://amzn.asia/d/cfta55x | 用于头部紧固件 |
| **M2x4 自攻螺钉** | 4 | [仅供参考] https://amzn.asia/d/1msRa5B | 用于头部紧固件 |
> 注意:加粗项目是进行遥操作任务时的必需设备,其余项目是录制[数据集](https://huggingface.co/unitreerobotics)时的可选设备。
## 5.2 🔨 安装示意图
| 项目 |
仿真 |
实物 |
| 头部 |
 头部支架
头部支架
|
 装配侧视
装配侧视
|
 装配正视
装配正视
|
| 腕部 |
 腕圈及相机支架
腕圈及相机支架
|
 装配左手
装配左手
|
 装配右手
装配右手
|
> 注意:如图中红圈所示,腕圈支架与机器人手腕接缝对齐。
# 6. 🙏 鸣谢
该代码基于以下开源代码库构建。请访问以下链接查看各自的许可证:
1. https://github.com/OpenTeleVision/TeleVision
2. https://github.com/dexsuite/dex-retargeting
3. https://github.com/vuer-ai/vuer
4. https://github.com/stack-of-tasks/pinocchio
5. https://github.com/casadi/casadi
6. https://github.com/meshcat-dev/meshcat-python
7. https://github.com/zeromq/pyzmq
8. https://github.com/Dingry/BunnyVisionPro
9. https://github.com/unitreerobotics/unitree_sdk2_python
