
+ Classic Head (98mm) +

+ Renewed Head (88mm) +
| Item | +Quantity | +Specification | +Remarks | +
|---|---|---|---|
| Unitree General Humanoid Robot G1 | +1 | +https://www.unitree.com/cn/g1 | +Developer computing unit version required | +
| XR Device | +1 | +
+ apple-vision-pro + pico4-ultra-enterprise + quest-3 + quest-3s + |
+ + Please refer to our WiKi [XR_Device] + | +
| Router | +1 | +Recommended: at least WiFi6 support | +Required in wired mode; optional in wireless mode. | +
| User Computer | +1 | +Recommended x86-64 architecture | ++ For simulation mode, please follow + NVIDIA official hardware recommendations + for deployment. + | +
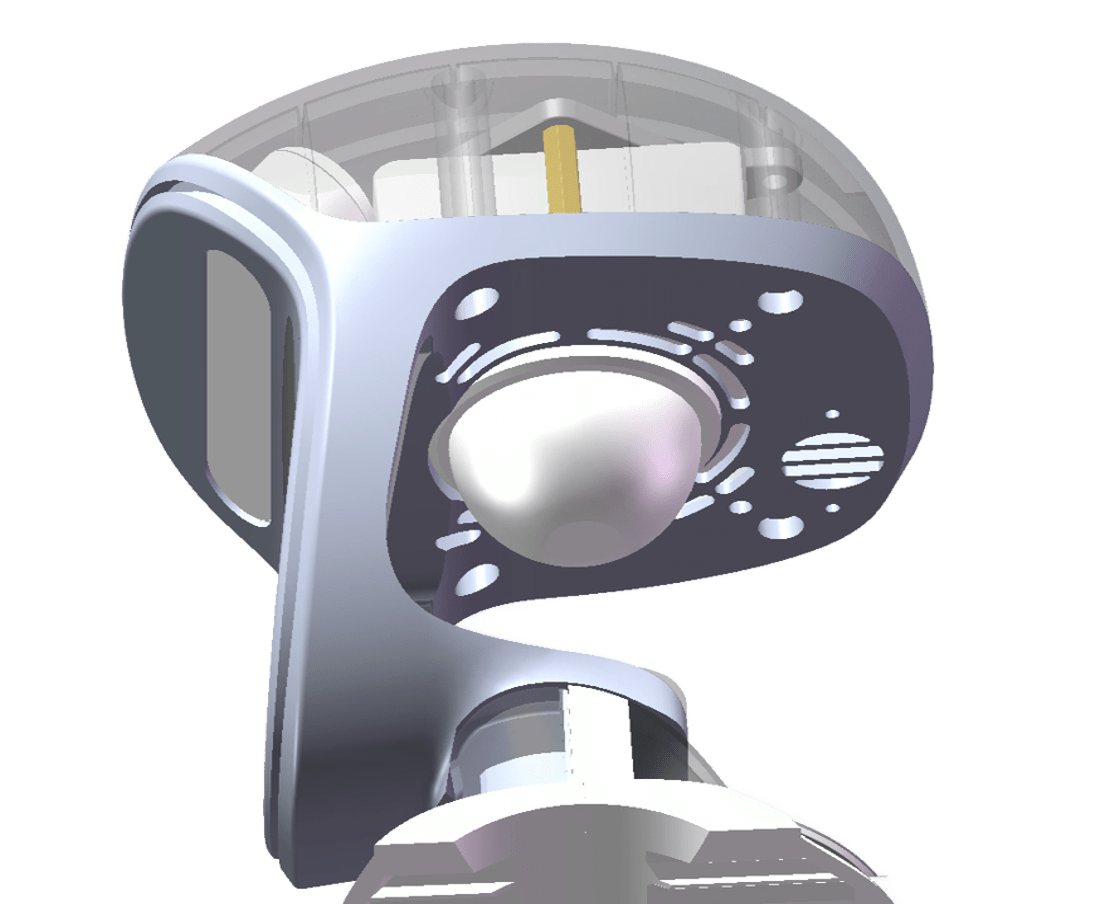
| Head Camera | +1 | +
+ Monocular camera (built-in Realsense D435i) + Stereo camera (external mount, see details at chapter 5.2) + |
+
+ Used for robot head perspective, stereo camera provides more immersion. + Driven by image_server + |
+
| USB3.0 Cable | +1 | ++ Type-C double straight connectors, about 0.2m length + | ++ For connecting the stereo head camera + | +
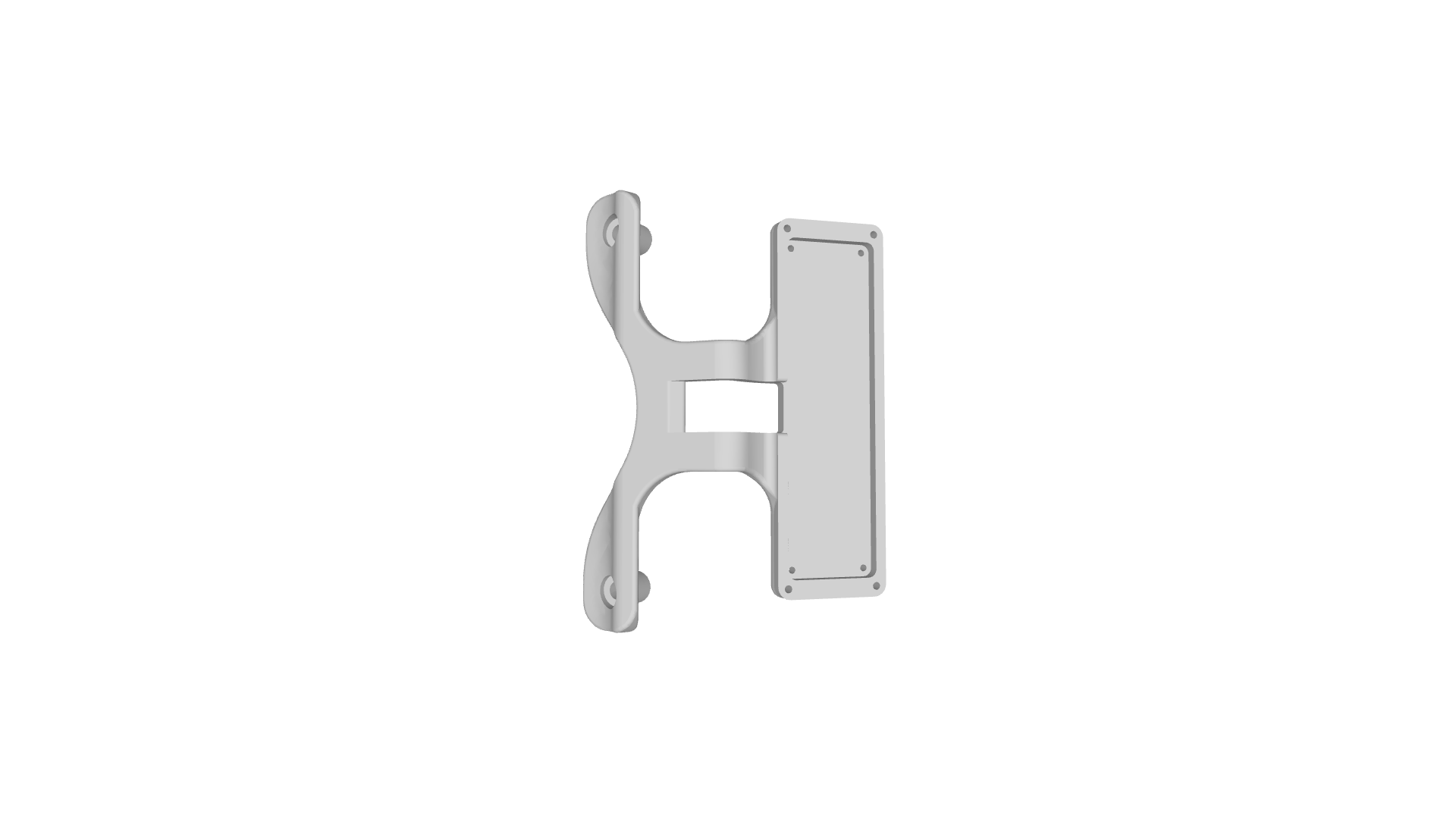
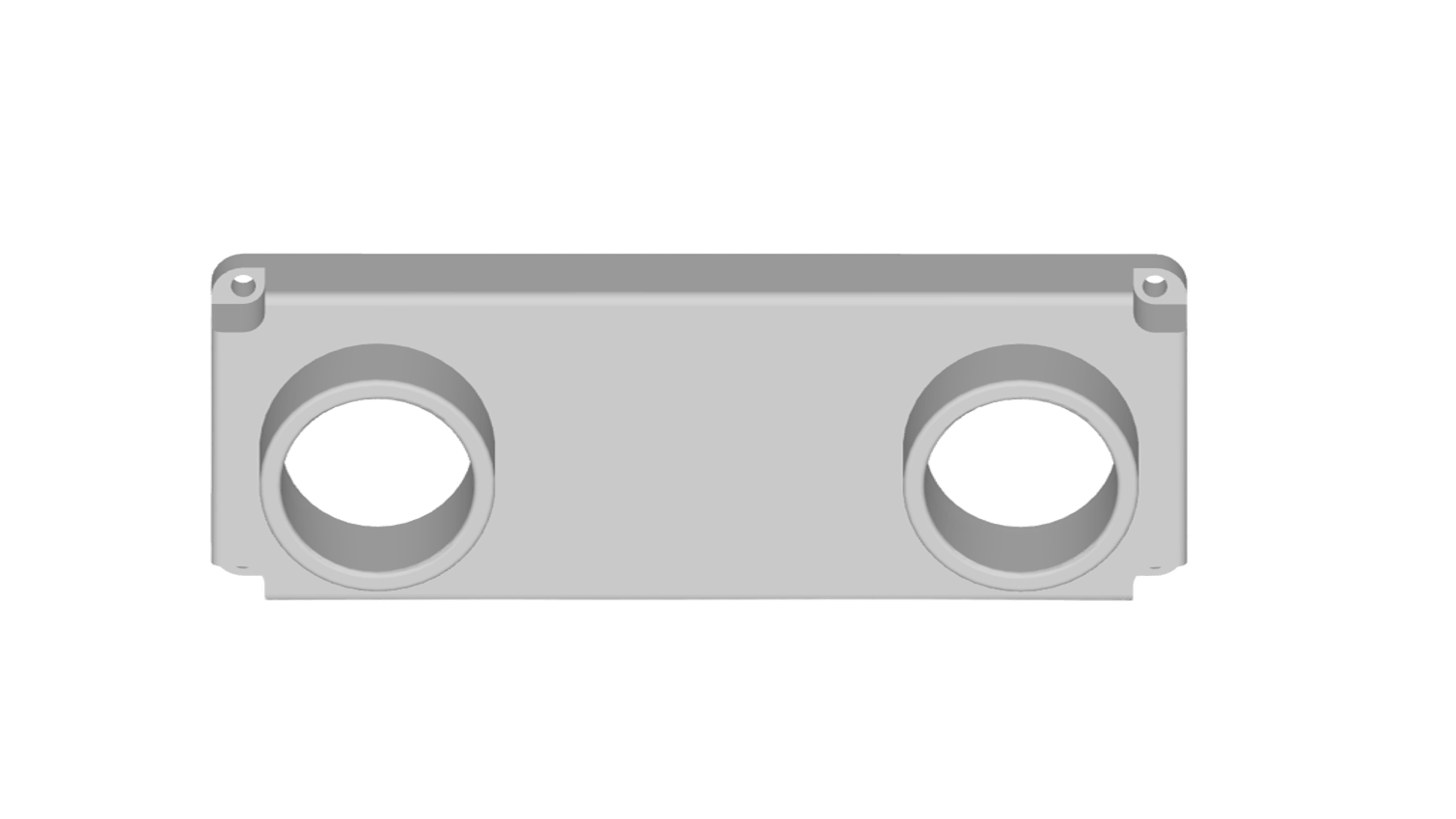
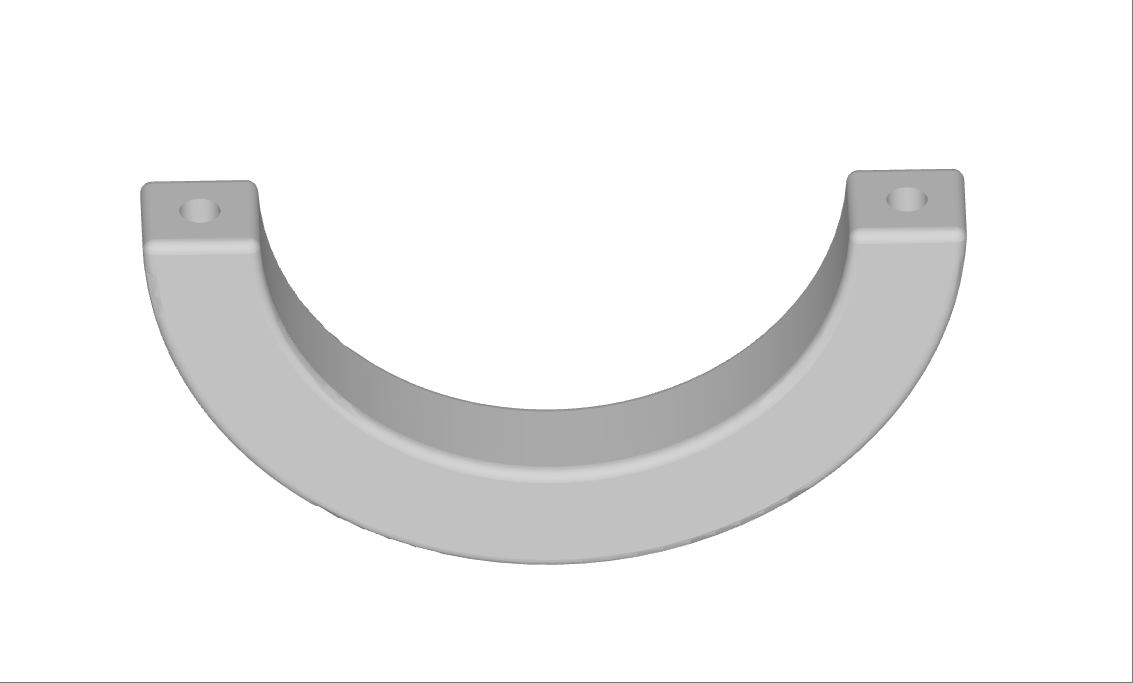
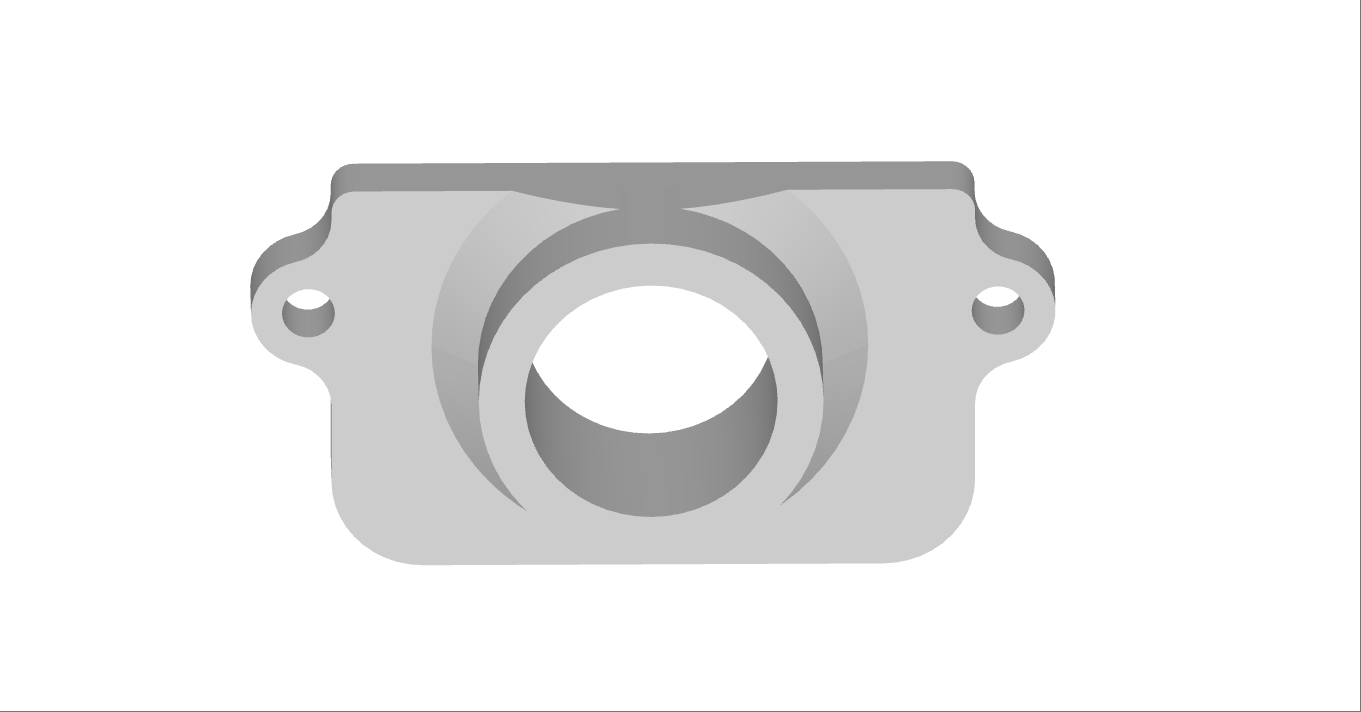
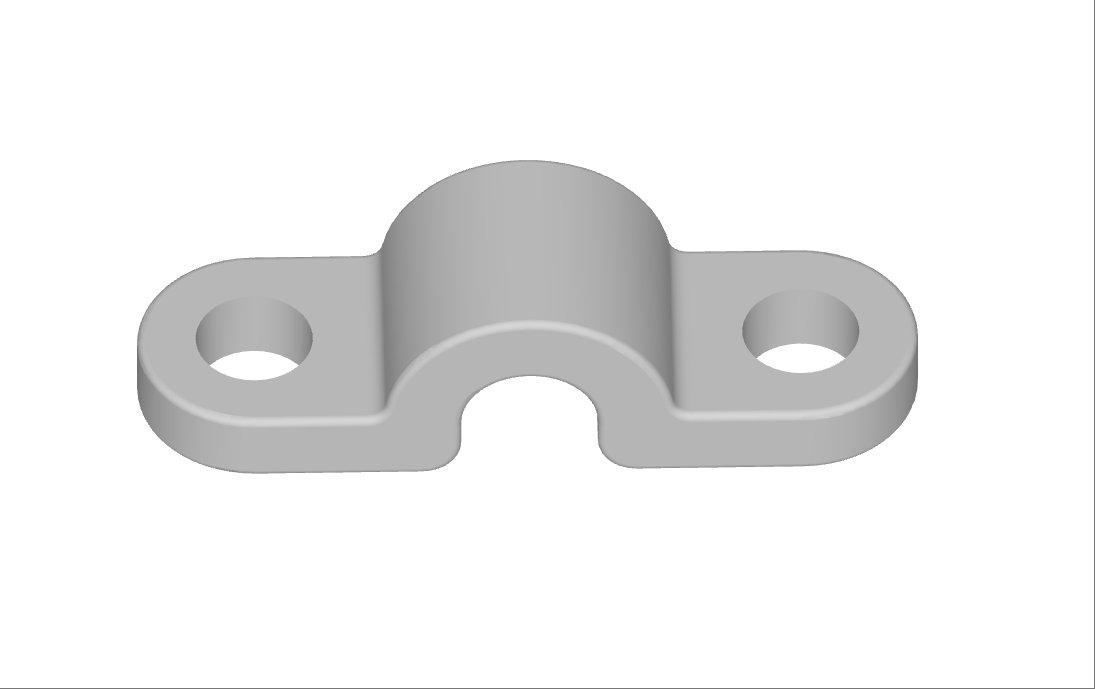
| Item | +Camera Bracket | +Camera Cover Plate | +USB-Type-C Clamp | +Download Link | +
|---|---|---|---|---|
|
+ + Classic Head (98mm) + |
+ |
+ |
+ |
+ 📥 Classic 3D Printing Parts | +
|
+ + Renewed Head (88mm) + |
+ |
+ |
+ |
+ 📥 Renewed 3D Printing Parts | +
| Item | +Camera Bracket | +Camera Cover Plate | +Download Link | +
|---|---|---|---|
|
+ + Classic Head (98mm) + |
+ |
+ None | +📥 Classic 3D Printing Parts | +
|
+ + Renewed Head (88mm) + |
+ |
+ |
+ 📥 Renewed 3D Printing Parts | +
| End-Effector | +Camera Mount | +Wrist Ring | +Camera Cover Plate | +Cable Clip | +Download Link | +
|---|---|---|---|---|---|
| Unitree Dex1-1 | +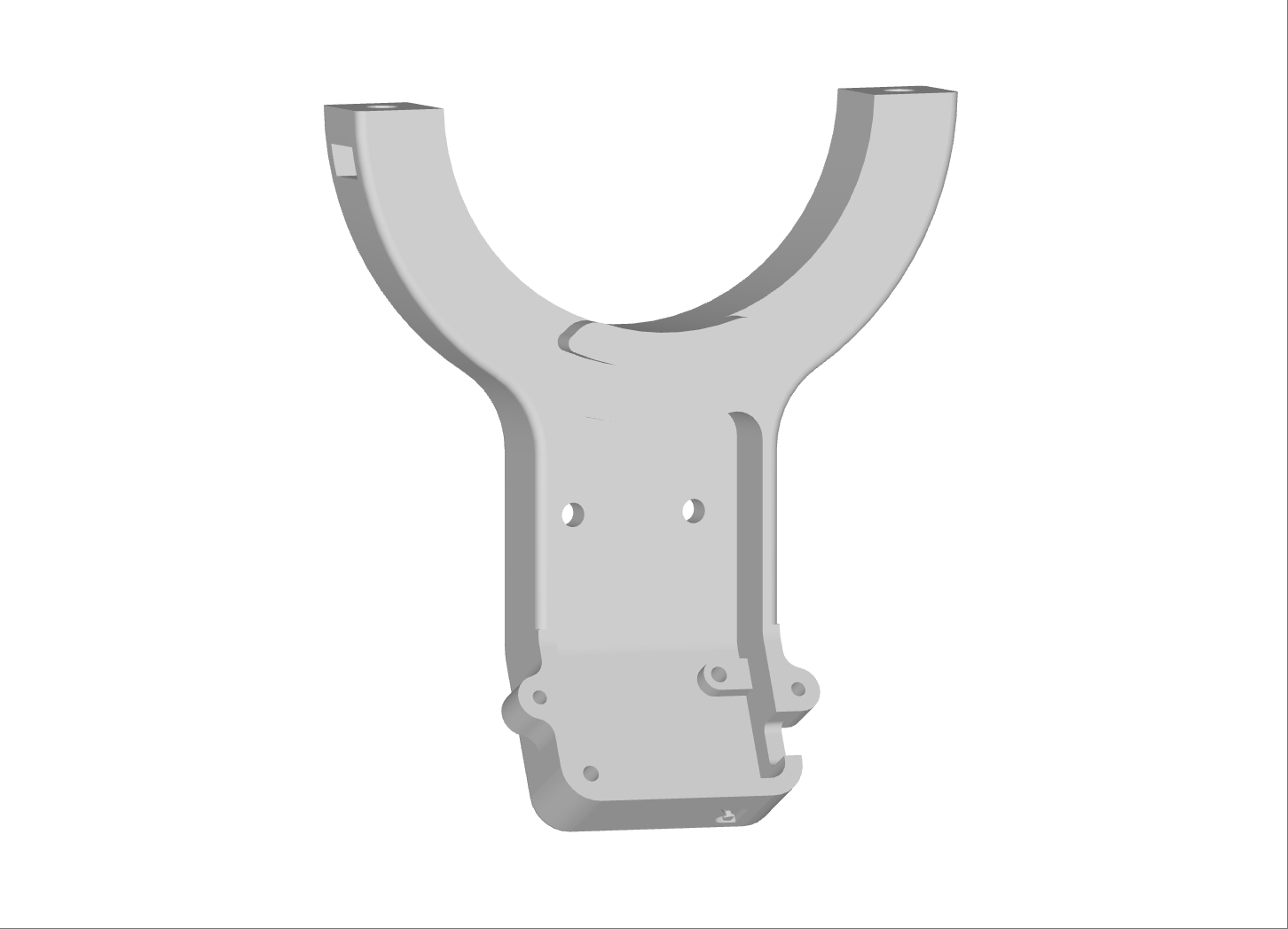 |
+  |
+  |
+
+  +
+ |
+ + 📥 Download 3D Printing Parts + | +
| Unitree Dex3-1 | +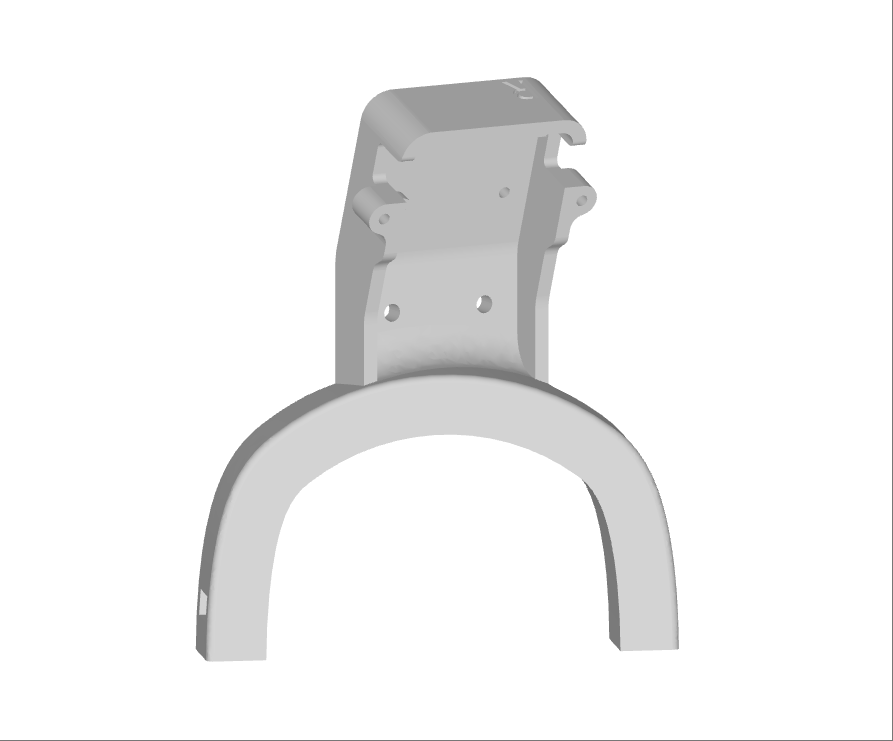 |
+  |
+  |
+ ||
| + Inspire DFX Hand / + Brainco Hand + | + |
+  |
+  |
+
| Item | +Simulation | +Real Device | +||
|---|---|---|---|---|
| Head | +
+
+ |
+
+
+ |
+
+
+ |
+ |
| Wrist | +
+
+ |
+
+
+ |
+
+
+ |
+ |
| 项目 | +数量 | +规格 | +备注 | +
|---|---|---|---|
| 宇树通用人形机器人 G1 | +1 | +https://www.unitree.com/cn/g1 | +需选配开发计算单元版本 | +
| XR 设备 | +1 | +
+ apple-vision-pro + pico4-ultra-enterprise + quest-3 + quest-3s + |
+ + Please Refer Our WiKi [XR_Device] + | +
| 路由器 | +1 | +推荐至少支持 WiFi6 | +常规模式必须,无线模式可选。 | +
| 用户电脑 | +1 | +推荐 x86-64 架构 | ++ 仿真模式下请使用 + NVIDIA 官方推荐 + 的硬件资源进行部署使用 + | +
| 头部相机 | +1 | +
+ 单目相机(机器人内置 Realsense D435i) + 双目相机(支架外置,详情见5.2节表格) + |
+
+ 用于机器人头部视野,双目相机更有沉浸感。 + 使用 image_server 文件驱动 + |
+
| USB3.0 数据线 | +1 | ++ 双直头Type-C,长度0.2米左右 + | ++ 用于连接头部双目相机 + | +
| 项目 | +相机支架 | +相机盖板 | +USB-Type-C 压块 | +下载链接 | +
|---|---|---|---|---|
|
+ + 经典版头部(98mm) + |
+ |
+ |
+ |
+ 📥 经典版3D打印结构件 | +
|
+ + 焕新版头部(88mm) + |
+ |
+ |
+ |
+ 📥 焕新版3D打印结构件 | +
| 项目 | +相机支架 | +相机盖板 | +下载链接 | +
|---|---|---|---|
|
+ + 经典版头部(98mm) + |
+ |
+ 无 | +📥 经典版3D打印结构件 | +
|
+ + 焕新版头部(88mm) + |
+ |
+ |
+ 📥 焕新版3D打印结构件 | +
| 末端执行器 | +相机支架 | +腕圈支架 | +相机盖板 | +线卡 | +下载链接 | +
|---|---|---|---|---|---|
| Unitree Dex1-1 | + |
+ |
+ |
+
+
+ |
+ + 📥 3D打印件下载链接 + | +
| Unitree Dex3-1 | + |
+ |
+ |
+ ||
| + Inspire DFX Hand / + Brainco Hand + | + |
+ |
+ |
+
| 项目 | +仿真 | +实物 | +||
|---|---|---|---|---|
| 头部 | +
+
+ |
+
+
+ |
+
+
+ |
+ |
| 腕部 | +
+
+ |
+
+
+ |
+
+
+ |
+ |
| Item | -Simulation | -Real | -||
|---|---|---|---|---|
| Head | -
-
- |
-
-
- |
-
-
- |
- |
| Wrist | -
-
- |
-
-
- |
-
-
- |
- |
| 项目 | -仿真 | -实物 | -||
|---|---|---|---|---|
| 头部 | -
-
- |
-
-
- |
-
-
- |
- |
| 腕部 | -
-
- |
-
-
- |
-
-
- |
- |
 +
+  +
+  +
+  +
+  +
+  +
+